宇宙空間で「自撮り」をする、リーマンサット・プロジェクトの超小型人工衛星『RSP-01』。
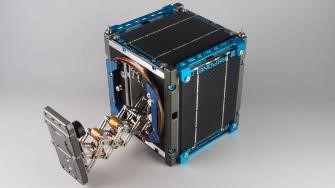
かっこいい人工衛星が自撮り棒となるアームを伸ばして地球を背景に「自撮り」をする、というミッションを達成するために各開発担当がこだわってきたこと、みえてきたものはなんだったのか。開発リーダーたちへのインタビューの第5弾。
熱・構造系、C&DH系、電源系、PM、通信系の開発リーダーたちに続き、今回は、サブ・ミッション系リーダーの大伍克則さんと空久保充弘さんに「自撮り」するミッションや通信機に対するこだわりや想いについて、お話をうかがいました。
<Interview & Text: 鬼頭佐保子 技術広報課&RSP-01>
 【RSP-01 サブ・ミッション系リーダー 空久保 充弘さん】
【RSP-01 サブ・ミッション系リーダー 空久保 充弘さん】
--RSP-01のサブミッションは、「画像判定」と「チャット」ということで、空久保さんは「画像判定」の開発リーダーを担当していましたが、どういうことをしているのですか?
空久保 RSP-01のカメラで撮影された自撮り画像の、「良し」「悪し」を判定するソフトウェアを開発しました。
--空久保さんは、普段どういうお仕事をされていて、それがどう「サブ・ミッション系」としての活動につながったのでしょうか?
空久保 普段はデータ分析系の開発をしていて、機械学習に興味があって何か開発に関われないかなーと常々思っていたところ、たまたま RSP-01 で画像判定やりたい人を募集していたので思わず飛び込んでました。ただ、当時は機械学習を使った開発経験がなく、どうしようかなーと考えた結果、RSP-01 のメンバーで勉強会をやってみることにしました。有識者の人も参加してくれて、客観的に見て良い勉強会・・・だったとは思うんですが、僕は全然理解できませんでした。(笑)
仕事でデータ処理のプログラミングを書いていたので、サンプルを参考に動くものはすぐ作れたんですけど、コードの意味がわからない状態で。そんなとき、たまたま本業の方の会社で機械学習の研修を受けさせてもらえて、そこでようやく今まで書いてきたコードはこういう意図があったんだなとわかりました。
まぁ正直、機械学習の処理は重たいし、良しと判定したい画像も明確だったので、無理に機械学習を使わなくても良かったんじゃないかなーと思うことは何度もありましたが、個人的な勉強になりましたし、機械学習という流行りを取り入れたほうがメディア受けするとも思ったので、やって良かったなと思います。
 --機械学習というと難しい分野というイメージがあります。興味があったから知識ゼロから作りはじめたというところが、すごいですね! そして勉強しながら機械学習を使ってソフトウェアを開発してきたなかで、良い「自撮り」画像を判定するためにここは苦労したということは何でしたか?
--機械学習というと難しい分野というイメージがあります。興味があったから知識ゼロから作りはじめたというところが、すごいですね! そして勉強しながら機械学習を使ってソフトウェアを開発してきたなかで、良い「自撮り」画像を判定するためにここは苦労したということは何でしたか?
空久保 機械学習の学習に用いる画像の準備です。RSP-01は宇宙空間で地球を背景に自撮りをするわけですが、実際に撮影した写真がないので、国際宇宙ステーションが撮影した写真などをもとに合成や加工をして作成するのですが、衛星と地球の位置関係や、宇宙空間で写真を撮影したときに発生するトラブルなど、色んなパターンの組み合わせを準備するというのが大変でした。いや、大変でしたというか、実際にまだ宇宙で撮影し判定していないので、正しく学習ができたかどうか、まだわからないのですが・・・。
--確かにそこは地上での開発の難しいところですよね。他にソフトウェア機能を検証するために、どんな試験をしてきたのですか?
空久保 画像判定のソフトウェア単独では、そんなに複雑なことをやっていないので、どちらかというと他のソフトウェアとの結合試験を重点的にやりました。やっぱり他の系とのインターフェース(プログラム間のデータのやりとり)の認識の齟齬などがあって、何度も結合試験に失敗しました。でも、最終的には試験をパスできたので OK です!
--サブ・ミッション系の開発のなかで、他のメンバーとは、どんなふうに一緒に作業をしていたのでしょうか?
空久保 実は「画像判定」のチームは開発当初は3人くらいいたのですが、メンバーもいれかわりたちかわりで最終的には自分一人で作業していましたね(笑)。また、僕はあまり工場に行かなかったので、試験環境の構築などは、もう一人のサブ・ミッション系のリーダーである大伍さんにおんぶにだっこで、とても助かりました。
--最後に、次に向けての思いや楽しみにしていることを聞かせてください。
空久保 不安だらけなので、早く実際に動いているところを見てみたいですね。上手く動かなかったら、メンバーに「土下寝」でもしつつ、何が悪かったのか調べて、次に繋げることができたら良いなーと思ってます。
【RSP-01 サブ・ミッション系リーダー 大伍 克則さん】
--まず最初に、大伍さんがリーダーをされているサブミッション系での「チャット」機能の開発とはどういうことをしているのですか?
大伍 人工衛星とのチャットを実現すべく、人工衛星側と地上側のシステムを開発しています。このチャットが実現するとリーマンサット・プロジェクトのメンバー以外の方もRSP-01と会話が楽しめることになります。
--誰でも超小型人工衛星RSP-01と会話ができるんですよね! そのための開発のポイントになるのはどういったところですか?
大伍 常に宇宙空間にいる人工衛星という特殊な環境で、チャットシステムを動かすことが、やはりポイントになるかと思います。というのも、人工衛星とやり取りするチャット文章はそれなりのデータサイズになります。これを圧縮・分割して送受信することや、人工衛星や地上システムがデータを受信し損ねた場合に再送できるようにすることは、設計当初から気を使っていました。
あとは、チャットのキャラですかね。RSP-01の筐体やケーブル(赤)などのキャラがチャットに応答してくれて、時々「その話は筐体に聞け」とか、たらい回しにされることがあります。(笑)
--いま筐体はそれどころじゃないんではないか・・・とか思いながら、違うキャラとチャットできるのも楽しいかも!そうしたキャラ付けとか楽しい会話のやりとりができるチャット機能の開発にも「機械学習」が使われたのでしょうか? 複雑な開発にみえます。
大伍 そうですね。当初、RNNというディープラーニングの機械学習方式が文章生成に使えるという情報を得ていたので、それを採用しようとしていました。ただし、RNNはデータの学習に時間がかかることと、応答文章の生成に数分を要する事、さらにはこちらの使い方が悪かった事もあり応答文章が日本語の体をなさないという問題がありました。入力に対して別な文章を生成するなんて、Google翻訳みたいにやれば良いんでしょ?と楽観視していたのですが、全然ダメでしたね。
これらの問題に対応すべく、機械学習の方式を変更し、入力文章を機械学習でカテゴリ分けし、そのカテゴリにあった応答文章を地上に返す方式にしました。これにより、学習時間と処理時間の劇的短縮(笑)と、応答文章のハンドリングも出来るようになりました。

ーーこうしたプログラムを検証するためには、どういった試験をしてきたのですか?
大伍 チャット自体の試験は、ほぼPCで出来てしまうので、実際の回路基板にてC&DH系と結合して動かす段階で特に時間を要しました。宇宙に送られる実機であるFM(フライト・モデル)を製作する前のEM(エンジニアリング・モデル)の段階では、まだ回路基板が安定しておらず、C&DH系との通信が出来なかったり、不正なデータが発生するなどの事象が頻発していました。この辺の対応は、C&DH系の開発担当の方々のがんばりにより、逐一改善されていきました。C&DH系の開発担当メンバーの方々のがんばりには頭が下がります。

ーーサブ・ミッション系のなかのメンバーとは、どのように共同作業をしていたのでしょうか?
大伍 コーディングもテストも自宅で行えるので、Skypeの打ち合わせで担当を決めて、後は自宅で作るという作業が多かったと思います。
チャット機能の開発に限らず、リーマンサット・プロジェクトのようなやりたいことがあれば誰でもという集まりに参加した後って、開発を始めるにしても最初は右も左も分からない状態なので、メンバーが自発的に開発作業に突っ込んでいくのは結構敷居が高いと思うんですよね。そういったメンバーに継続してタスクを作って、ある意味、居場所を持ってもらうのは、リーダーとして心掛けていたのですが、なかなか難しかったです。
ーー大伍さんは穏やかに淡々と取り纏めるリーダーというイメージです。普段のお仕事でもソフトウェア開発のチームリーダー的なお仕事をされているのでしょうか? またどうしてRSP-01でサブ・ミッション系リーダーをやることになったんですか?
大伍 ソフトウェアの会社で業務アプリケーションの開発をやっていました。ここ数年はザックリいうと企画系の仕事をしています。
私がリーマンサット・プロジェクトに参加した時期は、ちょうどRSP-01の開発が始まる時でした。私は宇宙が大好きというよりも、自分が作ったシステムが宇宙で動くことがモチベーションになっていて、人工衛星の開発が一からできる!という理由でRSP-01の開発に参加しました。
参加すると最初に何やりたい?という事になるのですが、当時RSP-01のメンバーはまだ数名で、各系のメンバーもリーダーも決まっていない状態でした。ただ、人工衛星で何をやるかということを決めるミッション定義は終わっていて、そのなかに「機械学習を利用したチャット」がありました。
当時、機械学習を学びたい学徒は多く(笑)、そのパワーワードにつられてチャット機能の開発に参加することにしました。まだ一人もメンバーがいないチャットに。
そうするとプロジェクト・リーダーから「サブ・ミッション系のリーダーやらない?」という話が来るわけで、まぁ、やってみるかという感じで、リーダーになりました。
ーー最後に、次に向けての思いや楽しみにしていることを聞かせてください。
大伍 今まさに打ち上げまでの秒読みが開始され、メンバーの期待が日々増している状態です。まずはその貴重な雰囲気を味わいたいと思っています。
そして、打ち上げと放出の成功を願いつつ、特に通信。RSP-01からのモールスが聞こえた時は皆とハイタッチして、喜びを分かち合いたいです。
多分、皆泣きますよね。メガネとか外しながら。
おじさんの漢泣きとか、あまり見たくないと思いますが。
ーーいやいや、皆で泣くと思います。みんなでオイオイ泣きましょう(笑)。
超小型人工衛星RSP-01の「チャット機能」と「画像判定機能」について、技術的なところをもっと知りたい!と思った方は、『ラズパイマガジン2019年08号』(日経BP社)で紹介された記事も是非お読みください。
ラズパイマガジン2019年 8月号
【ラズパイレポート】「宇宙で地球をバックに自撮りを ラズパイ衛星を今年打ち上げへ」
「ラズパイマガジン2019年08号」(日経BP社)2019年7月11日発売
そのまた未来へ、RSP-01プロジェクト、まだまだ新たなチャレンジを続けています!
ただいま運用メンバーも募集しています。参加についてはこちらから。
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】鬼頭 佐保子
広報部 技術広報課長、技術部RSP-01プロジェクトC&DH系、rsp.横浜支部長。
趣味は宇宙開発、宇宙教育、星空案内、美味礼賛。7つの海を渡るのが夢。