こんにちは、サラリーマンが趣味で宇宙開発するリーマンサットのロケットプロジェクトです。
いまどんなことをやっているのか、これから定期的にお知らせしていこうと思います。
ロケットプロジェクトは数年以内に宇宙(国際航空連盟による定義では高度100km以上)まで到達するロケットを作ることを目的にしています。
さらなる野望として、将来は火星まで到達するロケットを作ることも考えています。
現在は到達高度10km以下の固体燃料ロケットを打ち上げながら技術実証を行っています。
今年の打ち上げは、アメリカのネバダ州にあるブラックロック砂漠で行う予定です。
ブラックロック砂漠では毎年9月にXPRSというアマチュアロケットの打ち上げ会が行われており、リーマンサットのロケットプロジェクトもその大会に参加することにしました。
XPRS(eXtreme Performance Rocket Ships)はアメリカで行われる超大型模型ロケット大会です。
サイト→http://www.xprs.org/
プロジェクトマネージャーの角地は2016年から毎年参加しています。

ロケットの機体を適当な長さに切断している様子です。
リーマンサットのメンバーが働いている町工場をお借りして加工を行っています。
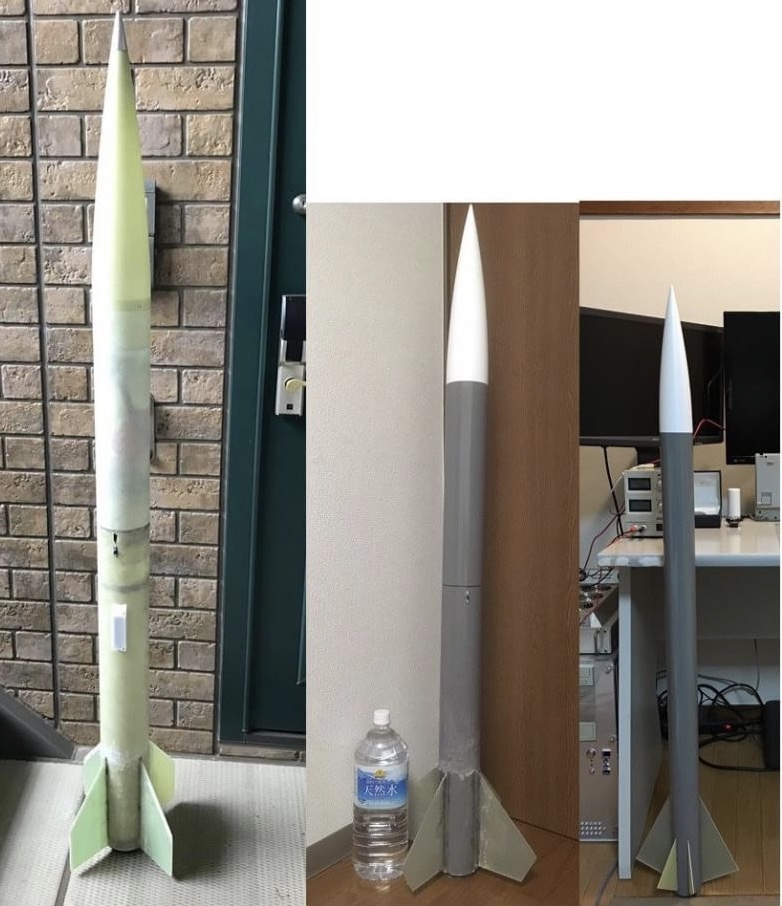
2019年9月にXPRSで打ち上げる予定のロケットです。
合計3機打ち上げる予定です。
今回は小型で構造が単純なので、1人1機を製作しています。このロケットにさらに塗装を施して、見栄えをよくする予定です。
ロケット内部には、計算した軌道と実際の飛行経路を比較するための気圧センサ、加速度センサ、及びその値を記録するロガーや、パラシュートを展開するためのタイマーなどが搭載されています。
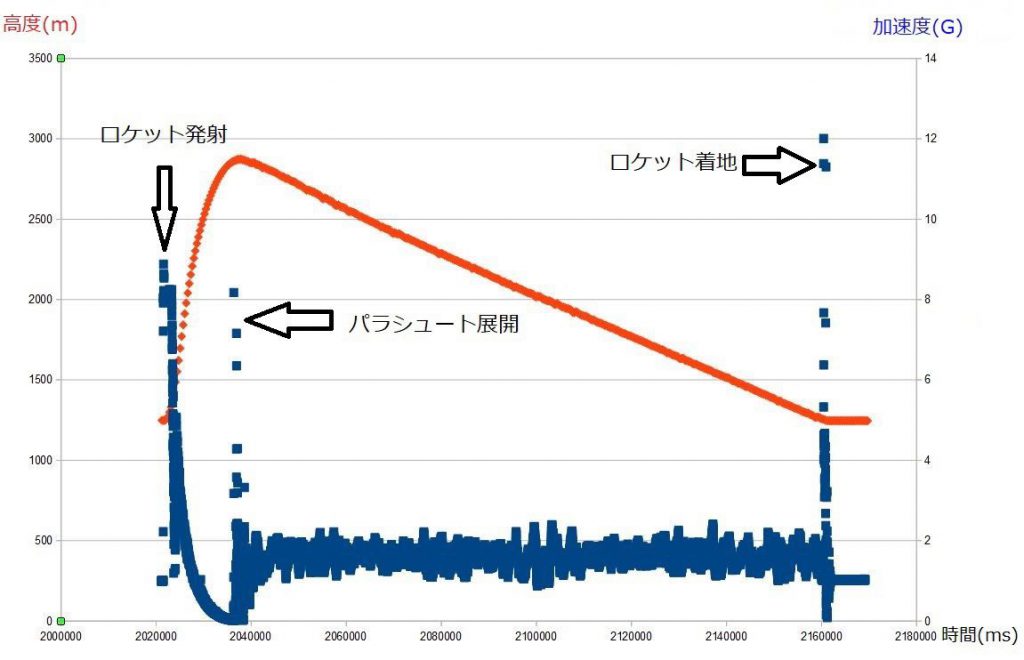
上のグラフは去年(2018年)のXPRSで打ち上げたロケットの高度と加速度のデータです。
現地の標高が1200mくらいで、標高2800mくらいまで到達したので、約1600m上がったことになります。
今年はこれよりさらに高く上げる予定です。
また、このグラフを見ると、ロケット発射時、パラシュート展開時(火薬でパラシュートを噴出しているのでその衝撃)及びロケットが地面に着地したときに加速度が急激に変化していることがわかります。
これにより、ロケットに搭載したセンサが正常に動作していることが確認できました。
来年(2020年)のXPRSでは、ロケットの姿勢制御の技術実証をしようと思っているので、ロケットの姿勢制御を担当してくれる方を募集しています。
また開発資金を調達するため、クラウドファンディングやスポンサーの募集なども考えていますので、資金調達に興味のある方もご参加をお待ちしています。
現在のロケットプロジェクトでは、現時点で日本国内にはアマチュアが高度1km以上のロケットを打ち上げるのに適した場所がないので、アメリカで打ち上げを行なっています。
しかし外国では燃料の調達が困難であることや、無線機など特別な免許が必要なものもあるので、近い将来は日本国内でロケットを打ち上げたいと思っています。
日本ではいくつかの民間企業もロケット開発を行っていますが、アマチュアだからできることを十分に発揮したいと思っています。
あなたも一緒に、ロケットを開発してみませんか?
↓リーマンサットってこんなところ↓