こんにちは!ローバーチーム広報の細田佳江です。
今月も前回に引き続き、Skypeなどオンラインミーティングで集まって開発作業をしています。
直接会わない分、開発に対するモチベーションが下がるかと思いきや、各担当に分かれての作業が、より進んでいるようです。
年始に決めた流れや担当を基本にしていますが、話し合いの中で少しずつ改善したりしています。
マザーボードチームでは、kicad(オープンソースのプリント基板CADソフト)による回路図設計が進んでいます。
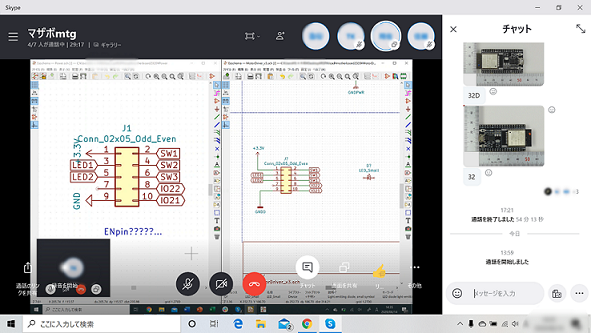
オンライン会議ツールで画面共有すると、みんなの開発している画面をリアルタイムで見ることができます。
kicadを触ったことのない広報の立場としては、「開発メンバーは普段こういう風に作ってるんだなぁ」というのが見えるのが、オンライン開発の面白いところです。
細かい回路を何時間も考えたり、開発メンバーの集中力がすごいです。
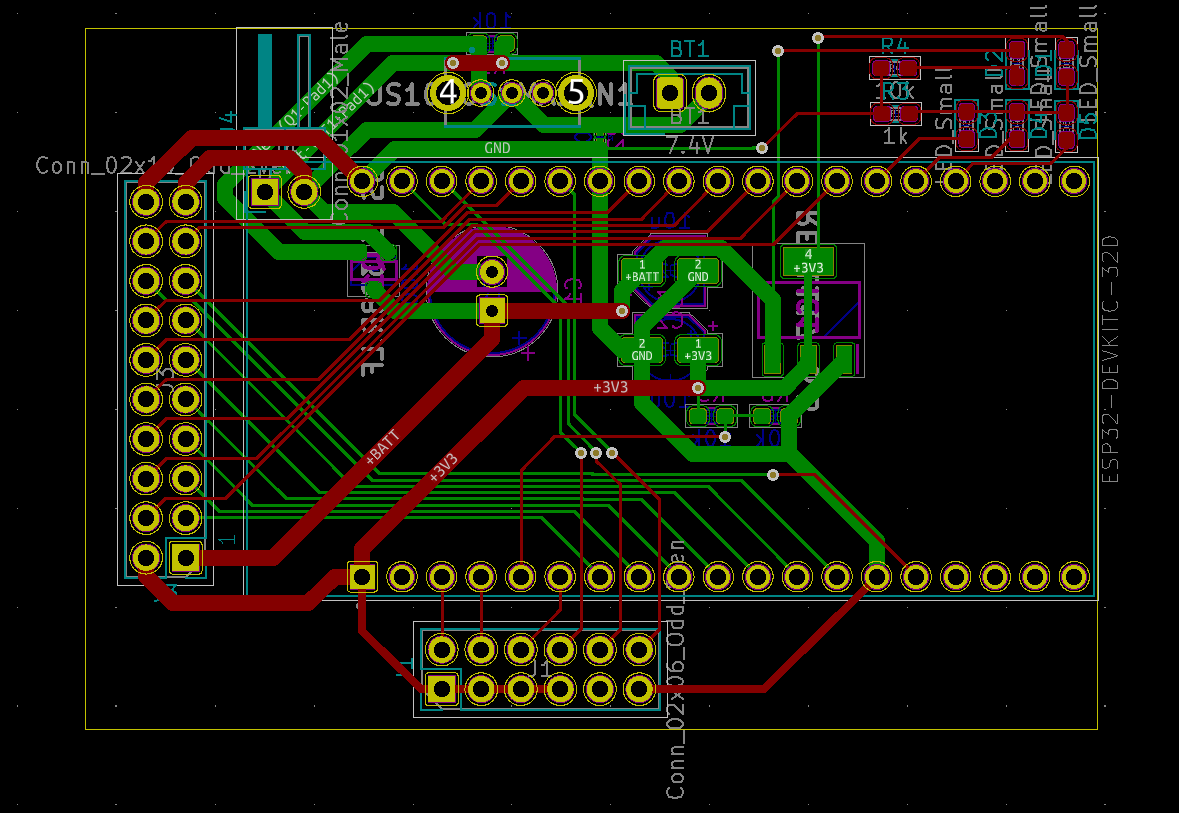
出来上がりがすごくきれいです。このまま飾っておけそうですね!
こちらは、電源回路やESP32マイコン、モータードライバー回路、サーボモーター回路などが載った、今回の土台となるマザーボードです。
ESP32マイコンは、dev kitを使用する事になりました。
dev kitとはUSBや書き込み用の回路などの周辺回路があらかじめ載っている、開発しやすいキットです。
今年は新規メンバーも増え、数人の合作マザーボードです。
新規メンバーには先輩に教わりながら完成させる人もいて、ますますローバーチームの幅が広がっていくのを嬉しく思う、広報担当でした。
個人的には、新しく入った女性メンバーが活躍しており、頼もしく思っています。
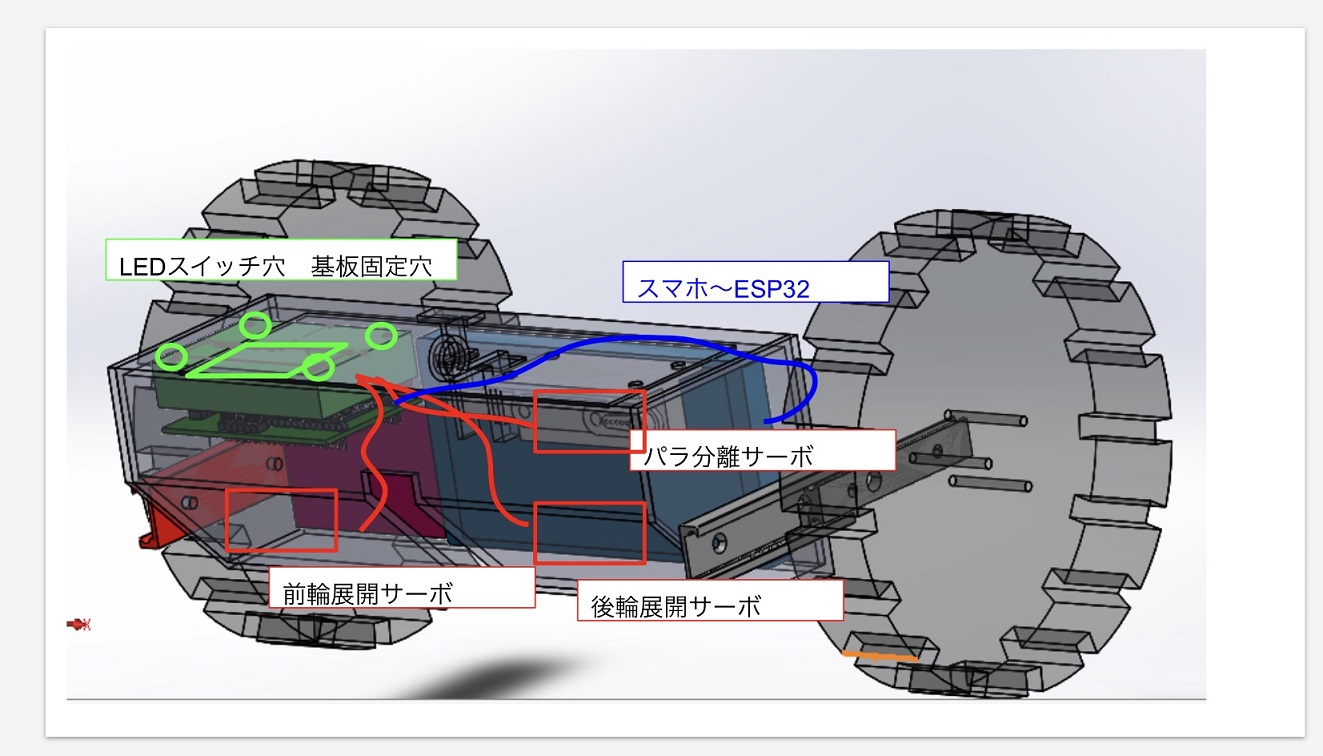
構造系チームでは、だいぶ形が定まってきたようです。昨年とはまた違った機構で、実物を見るのが楽しみです。
こちらも新規参加の女性メンバーが活躍しております。
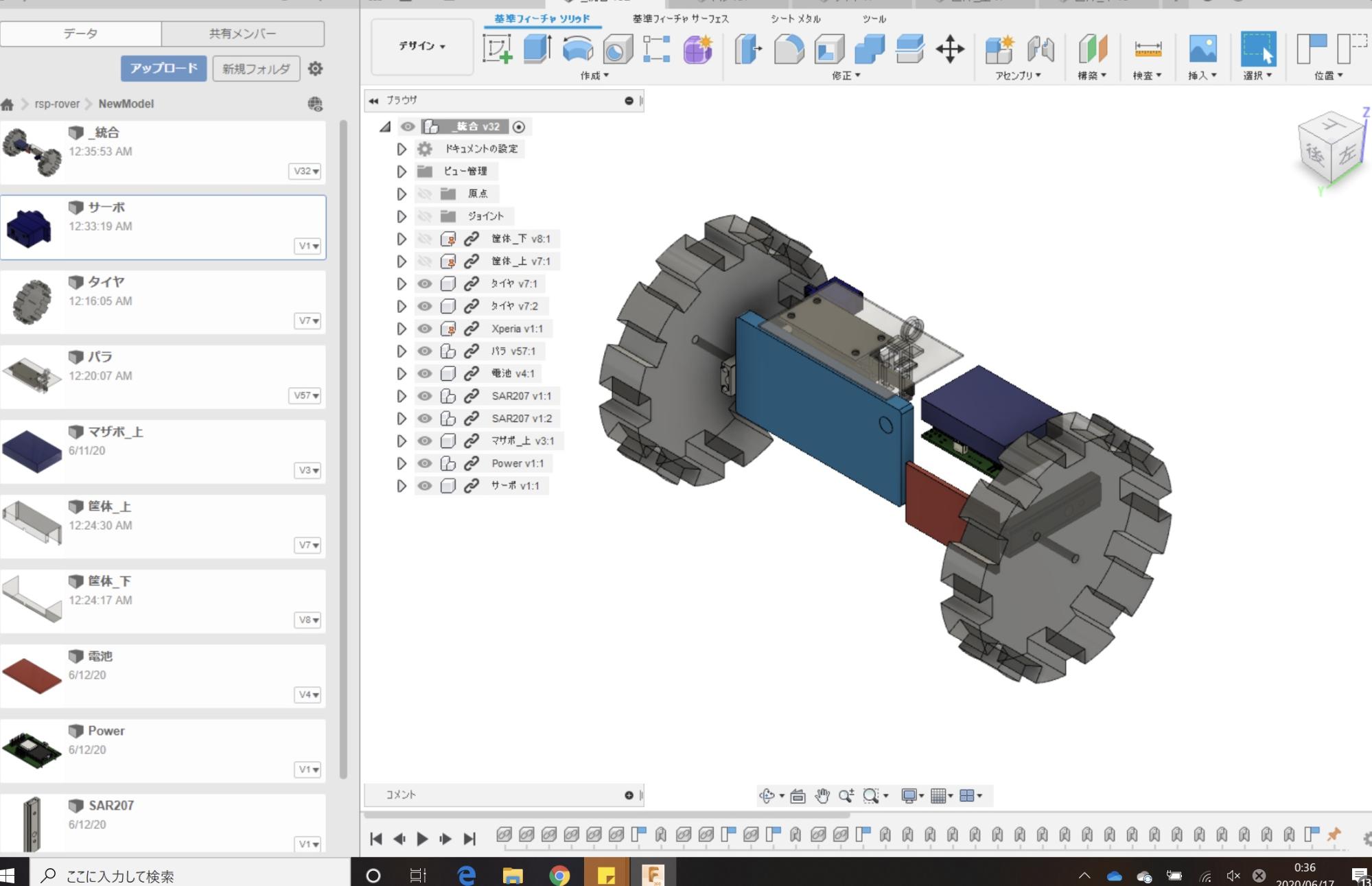
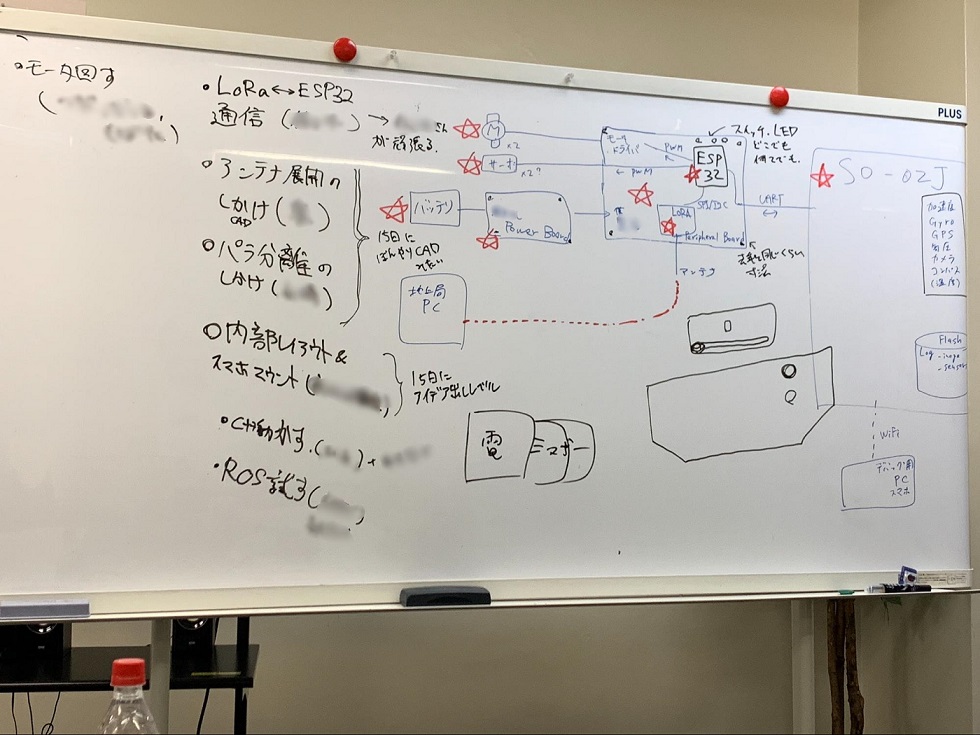
構造系チームでのオンラインミーティングでまとまった内容を、ローバーチーム全体ミーティングで共有し、配線や足りないところはないかなど打ち合わせます。
まだしばらくはオンラインでの作業が続きそうですが、開発スピードを緩めず、いま出来ることを模索しているローバーチームの6月進捗報告でした!
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
あなたも一緒に、ローバー開発してみませんか?
リーマンサットメンバーの活動を下記にまとめました。ぜひご覧ください!
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】技術部 ローバーチーム広報
細田 佳江(ほそだ よしえ)
カポエイラと宇宙が好きな管理栄養士です。宇宙でサウージするのが夢です!