こんにちは!ローバーチーム広報の細田佳江です。
自粛解除に合わせて、3密を避けつつ、少しずつオフラインでも集まるようになりました。
まだ予断を許さない状況なので、オンラインとオフラインをミックスさせてミーティングを重ねています。
最近では「spatialchat(スペイシャルチャット)」というミーティングツールを使っています。
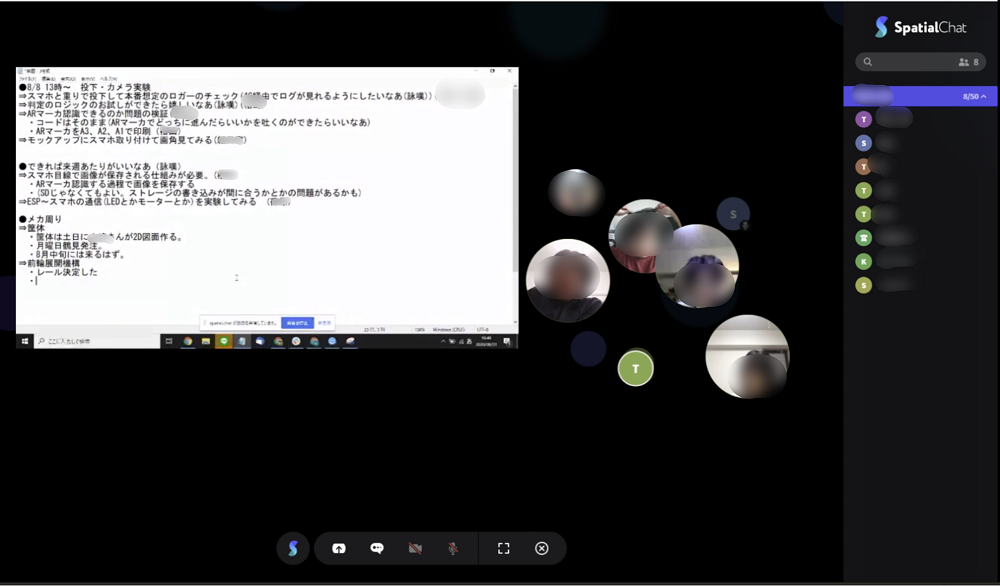
このように、ログインしたメンバーが小さな丸いアイコンに表示され、マウスやタッチ操作で
自由に画面内を移動することができます。
アイコン同士を近づけると声が大きくなって会話することができ、遠ざけると声が小さくなる
不思議で便利なオンラインツールです。
しかし、構造などは実物を見ながら検討するため、部品の選定などをオンラインでするには難しいところがあります。
はじめのうちは、部品や組み立てたものをアイコンに映して共有しようとしても、アイコンの◯はそんなに大きくはならないため、 オンラインで参加しているメンバーには全然見えないという問題が起きていました。
そこで、複数の画面共有ができるspatialchatの機能を活かし、2台目のパソコンのカメラを使って、少人数で集まって開発している ところを映して画面共有する、という方法で解決しました。
おかげで実物が見やすくなり、ミーティングも捗るようになりました!
今回の機体はこのような形に出来上がる予定です。
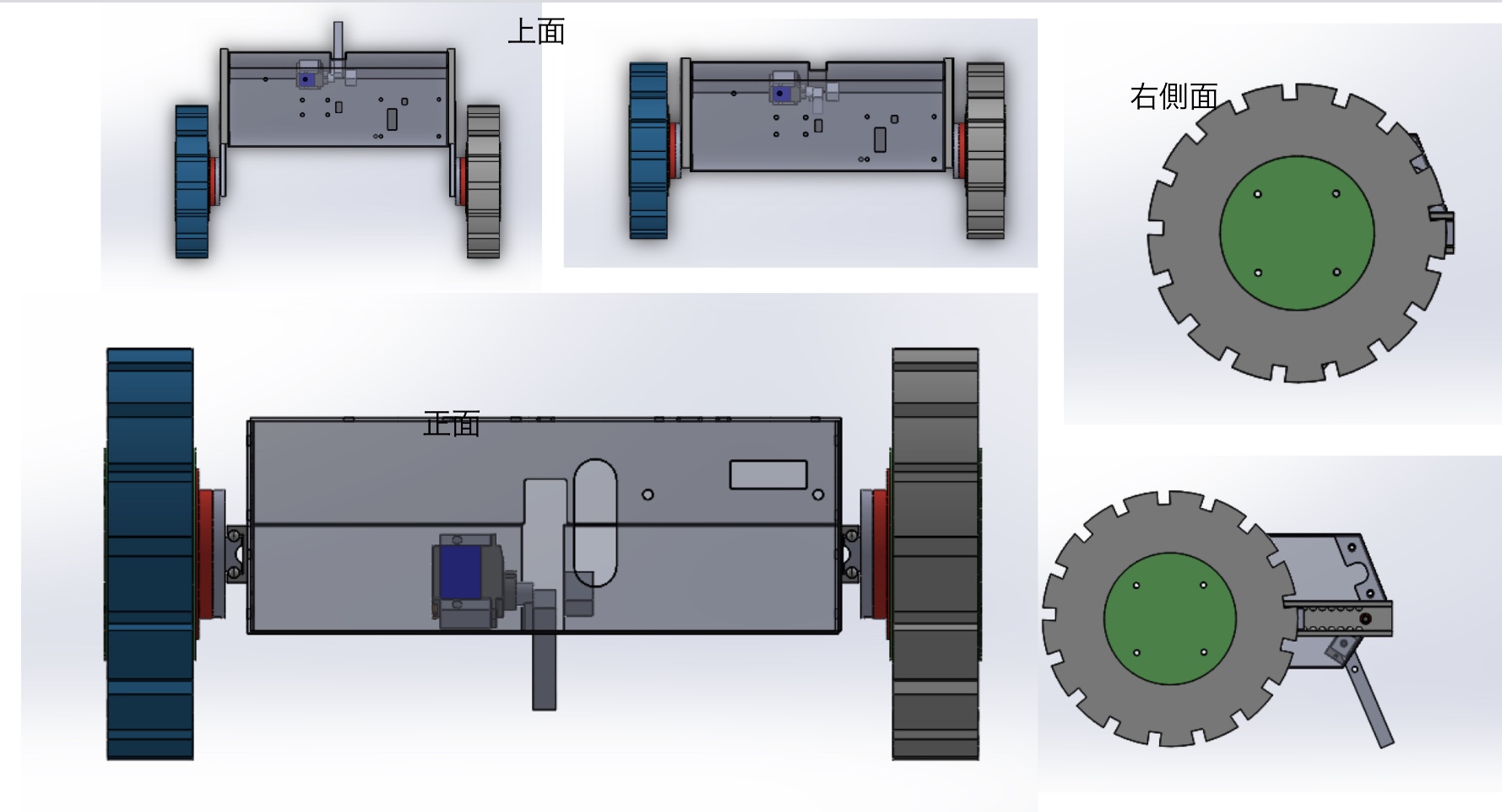

前回は二輪でしたが、今回は車輪展開により三輪になりました。
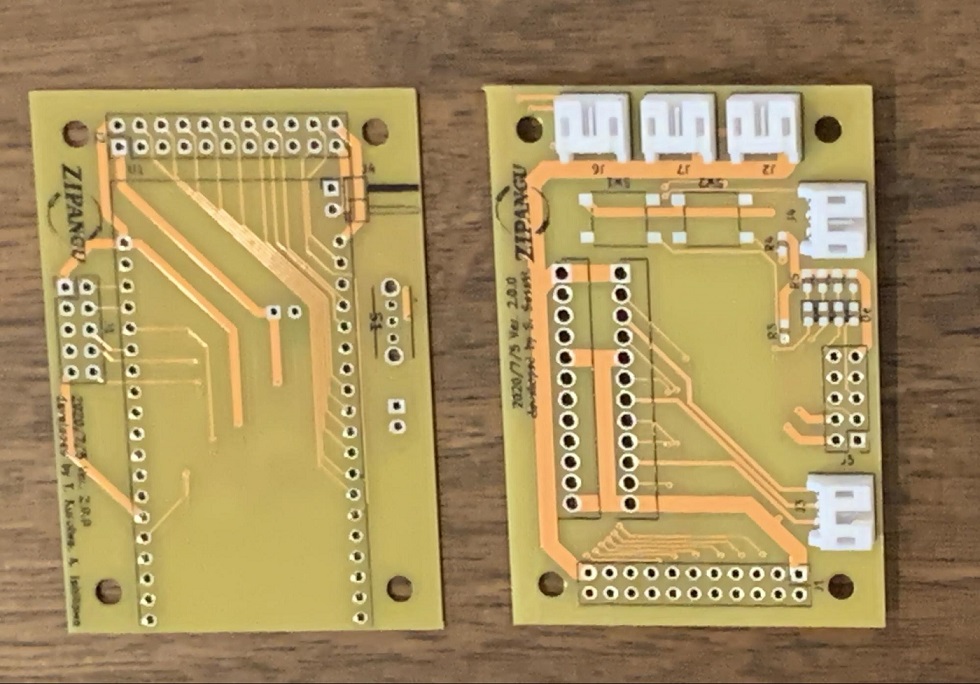
そして、「マザーボード(主要な電子回路基板)」が無事届きました!
前回は緑色でしたが今回は黄色です。可愛いです。
部品をはんだ付けします。

今回は、スペースを考慮して2段にしました。部品の凹凸を組み合わせています。

ここまでですでに出来上がってきたような気になっています。
前回のZIPANGU0号では、「DCモーター」を使用しており、183.1gと結構な重量がありました。

今年もスペースプローブコンテスト参加を目指しているので、重量1kg縛りがある中、頑張って軽量化しています。
そして、こちらが今回使用する予定の「ブラシレスモーター」です。

ブラシレスモーターの重量は108.7g。
前輪用のモーター2個で150g近く重量を減らせるのは大きいですね!
しかし、ブラシレスモーターはブラシが付いているDCモーターに比べて構造が難しいため、回すのに悪戦苦闘しています。
そんな時には、ローバーチームで使用している「Mattermost(マターモースト)」というコミュニケーションツールを使って、
どうやったら動かせたかなど、家で試したものをメンバー同士で共有し合っています。
なかなか集まることが難しい状況の中、工夫しながらミーティングや作業を進めています。
最近では、大学受験のためにお休みしていて、無事合格して戻ってきてくれたメンバーや、新しい参加者も増え、
今年の夏も頑張るローバーチームでした!
(このような状況でなかなか新規参加者に直接会えないのが残念です・・・)
引き続き、手洗い、マスク、適度な運動をして命大事に乗り切っていきましょう!
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
あなたも一緒に、ローバー開発してみませんか?
リーマンサットメンバーの活動を下記にまとめました。ぜひご覧ください!
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】技術部 ローバーチーム広報
細田 佳江(ほそだ よしえ)
カポエイラと宇宙が好きな管理栄養士です。宇宙でサウージするのが夢です!