秋も深まってきましたね、みなさんはどんな秋をお過ごしでしょうか。食欲の秋、芸術の秋、宇宙の秋、色々ありますね。
私は人工衛星の姿勢制御の秋です。
姿勢制御系A
RSP-02の開発メンバーには「姿勢制御系Aチーム」なるチームがあります。某特攻チームではありません。お年を幾らか召してないと分からないネタですみません。
姿勢制御系Aチームは、ミッション達成のために姿勢を正しくしていく為の機構を構築するチームです。そのままです。
「A」はAttitude Control Systemの略からきていて、BチームCチームはありません。日々会議し、各自連携をとってシミュレーション演算や実機テストなどをしています。
姿勢制御ってなんだ
物体の自由度は「位置」と「姿勢」で決まります。「位置」に関する事は実生活で例えれば<お店の前に居ます>などです。お店と自分との位置関係ですね。
「姿勢」の部分は、<お店を向いています>などの向きの関係です。この向きの事を考える分野です。
カメラで地球などの目標物を撮りたいなどを考えると、地磁気(地球の磁場)などでクルクル回ってしまうので、それを制御し止まろうとします。
同じチームのH氏曰く「回転する椅子に座っているとして、足を地面に擦り付けて止まるようなもんです」との事。
この場合、回転する椅子よりも強い力で足を踏ん張る必要がありますね。強力過ぎる力と戦う場合、足が発火するかもしれません。
姿勢制御の方法はいくつかあり、前プロジェクトRSP-01に搭載されているリアクションホイールなどありますが、RSP-02は磁気トルカのみでの運用となります。過去記事でリアクションホイールや磁気トルカに関する記事もありますのでご参照下さい。
【参考リンク】
(RSP-01のリアクションホイールの話が出てる記事リンク。原理も少し解説してます。)
(RSP-01の磁気トルカ製作記事リンク、原理と作り方を解説してます。名称が「トルクコイル」になってます。)
RSP-01は磁気トルカの本数は1本ですが、RSP-02は3本使い、X軸Y軸Z軸のそれぞれに対して制御を可能にします。
Bdot制御則での姿勢制御実験
Bdot制御則とは磁気トルカを作りそこに電流を流し磁場を発生させて、地球の磁場との関係で姿勢を制御する方法です。磁気トルカへの電流の向きを変えN極S極を自在に切り替えて、ある部分を地球に向け(引き合わせ)たり、それの逆を向けたりし姿勢を制御します。
実際には内部構造から出る磁場、地磁気の変化、地球の重力(潮の満ち引きでも変わります)、他の天体の引力、太陽光の影響など嫌になっちゃう位の要素があります。今回はそれはさておき、磁気トルカに電流を流せば制御効果があるかどうかに重点を置き実験しました。
実験環境はこちら。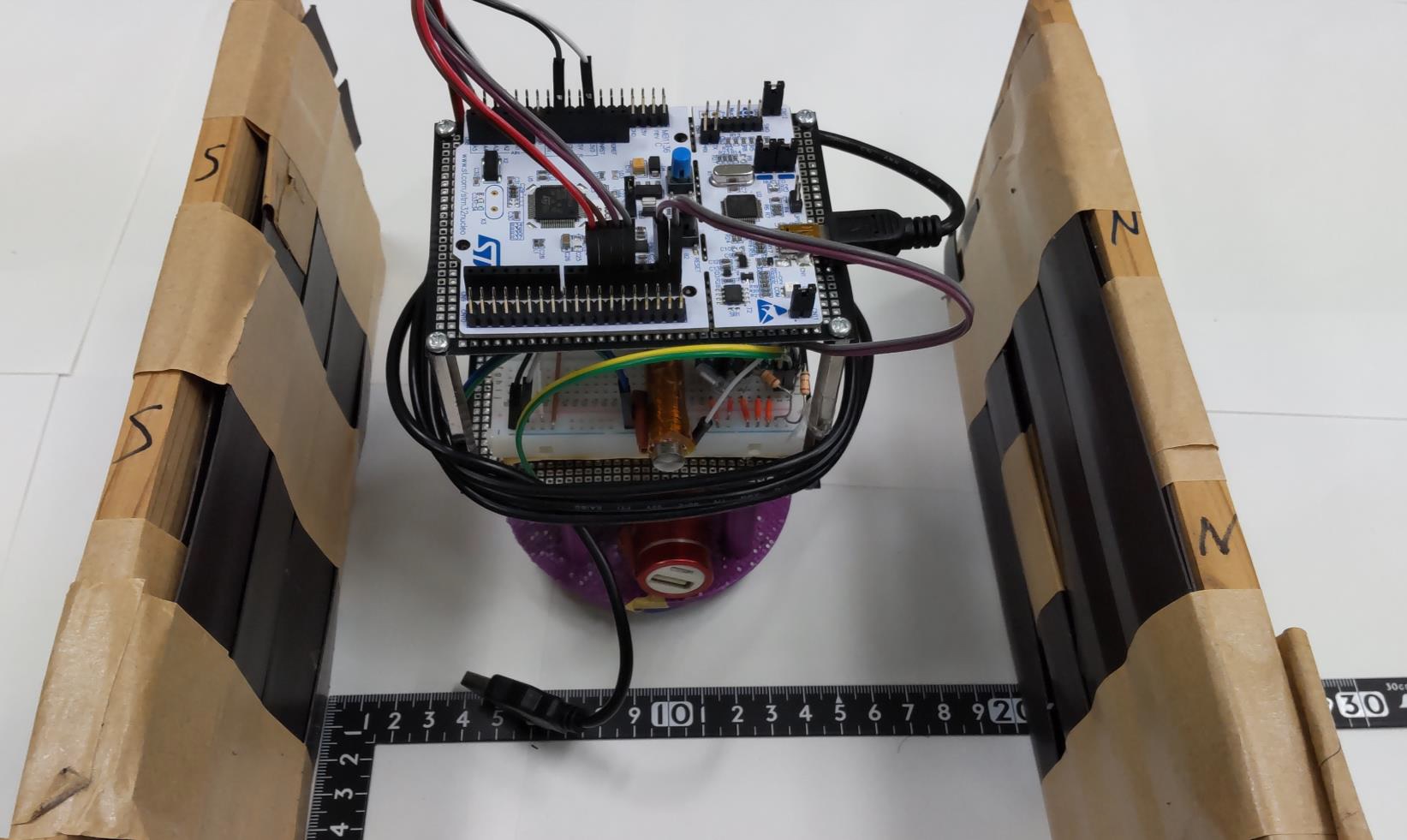
実験装置ですが、実験機はBdot制御則をもつ磁気トルカを搭載した人工衛星モドキ。磁気トルカの芯はパーマロイという素材を使っています。画像中央の棒状のものが磁気トルカです。余談ですが磁気トルカ作りは巻き装置が必要な作業で、綺麗に巻き付けるにはちょっとテクニックを必要とします。二人がかりで巻きつけました。
画像左右の壁は市販の磁気テープを同チームT氏が某所から手に入れた木板に付けたもので、それぞれS極N極として磁場を作ってます。その中に実験機を置きます。実験機の下はハンドスピナー、あの摩擦抵抗の少ない、少し懐かしい位のハンドスピナーで宇宙環境に近づけます。ハンドスピナーは宇宙に近づくためのアイテムでした。
磁場の中の実験機を人の手で回転させ、人為的に揺れを起こします。その揺れは自然放置でも収まり停止しますが、Bdot制御によって揺れが早く収まる(揺れる動きが鈍くなる)のを目標とします。果たしてブレーキは効くのか。逆に作用して加速してたらそれはそれで面白いですね。人が中に入って居たら大変なことになったでしょう。
実験のやり方がこちら
上記動画のデータではありませんが、別日の同じような方法での実験結果です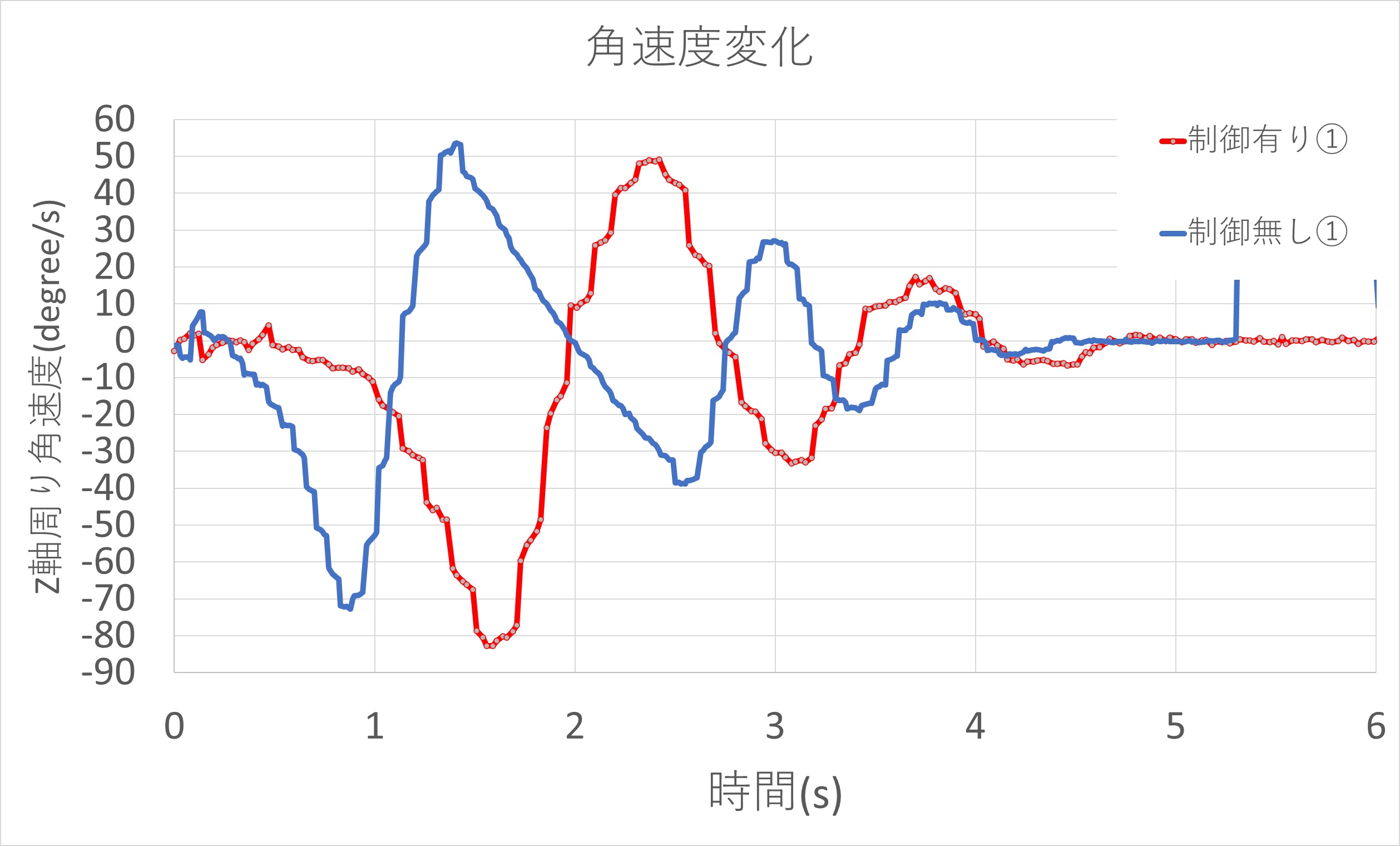
時間経過と、揺れ(回転)のグラフになります。見方としては制御無し青線のグラフは、0.8秒の時点で実験機は70度回った状態だったという事です。およそ5秒で揺れはどちらも収まったと言えます。
制御あり、無し共に収まるまでの時間は同じですが、収まるまでの振動回数が一回少なくなっています。(制御無しは山と谷を4回繰り返して収まったが、制御ありはその繰り返しは三回で収まっている)。
回転する速さも遅くなり、回転する力に対してきちんとブレーキが働いて安定に向かってるという事がわかりました。宇宙でもグルグル勝手に回る事を止められる!はず!
これからやる事は
今回の実験では、自作の磁気トルカとBdot制御則がちゃんと機能したことが分かりました。今後はシミュレーション上で算出されてる外力による回転(1秒に60度くらい回る)に対して、実際の宇宙での影響を加味した場合や、磁気トルカの巻き数をどうするかなど検討していきます。
宇宙空間と実験空間では磁場が数千倍違い、磁気トルカの芯の磁性体の影響や空気抵抗の違いなど、環境の違いも考慮しなければなりません。少しでも「確度をあげる(同チームH氏。カッコいい単語です)」という姿勢で取り組みます、姿勢制御だけに。
シミュレーションもして、実機テストもして、地道にデータの蓄積です。それをあくまで「趣味」として楽しく進めていきます。
『偉大な行動や思想は、ばかばかしいきっかけで生まれる。街角やレストランの回転椅子から、名作は生まれるのだ』
とか言われてた様な、違うような。
私は一つの実験結果データを見せてもらいましたが、30列1500行の数値の海となったExcelファイルにめまいを覚えた次第です。そんな初心者な私にも姿勢制御Aチームの皆さんは優しく丁寧に教えて下さいました。全く分からない方でも覚える気さえあればメキメキ成長できるチームかと思いますので興味のある方は是非参加してみてください。
説明会聞くのも会費も無料です!説明会に関しては最新の定例ミーティング記事をご確認下さい。
参加メンバーも募集中です!開発メンバーだけでなく広報、バックオフィス系も大歓迎です。
———-
【弐号機かわら版バックナンバー】
2011.10月号 基板をつくろう
2011.09月号 モーターの真空試験
2011.08月号 カメラモジュールの性能分析
2011.07月号 RSP-02新しいモックアップ完成
✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰
リーマンサット、2022年2月末からクラウドファンディング中です。
「憧れを宇宙へ! あなたと宇宙で “人工星座” を作りたい!!」
https://readyfor.jp/projects/rymansat4
私達がこの衛星で作ろうとしている「ロマンチックな人工衛星」と「人工星座」は、きっともっともっと皆さんと宇宙を近づけます。
皆さまのご支援をどうかよろしくお願い致します。
✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰✰
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】広報部 技術広報課 マツウラ
趣味はひっそりと派手にリーマンサット内で暴れる事(実際に暴れているとは言ってない)