こんにちは!リーマンサットローバーチームです。
今回はローバーチームの花形、電装チームのご紹介です。
電装チームの活動
電装チームでは主に、ARLISSというアメリカのブラックロック砂漠にて開催される競技の次の準備を行っています!
●長距離無線システムの構築と実験
○TWEILITE(無線機能を持ったマイコンモジュール)を用いたシステム構築の実験
○LoRa(低消費電力で長距離通信可能な無線通信方法)モジュールを用いたシステム構築と通信距離調査
●ARLISS用小型基板の製作

長距離無線システムの構築と実験
こちらの長距離無線システムの構築と実験では、比較的安価で扱いやすいTWEILITEと、本番での使用を目指したLoRaの2種類の無線モジュールを用いて無線システムの構築や通信距離の調査・実験を行っています。
ARLISS競技では、これまでローバーチームが参加していた北海道 植松電機様主催のSpace Probe Contestにおける100mよりもはるか上空、1km先へ筐体を打ち上げるため、落下地点の予測もはるかに難しくなります。
そこで、今回新たに導入する長距離無線システムの構築・実験が必要になりました。これまでもLoRaを用いた通信距離実験は行っていましたが、北海道のSpace Probe Contestではオーバースペックかつ重量の関係から、搭載は見送っていました。
TWEILITEを用いたシステム構築の実験
こちらは主に学部2年生の学生さんが進めてくれており、ラズパイゼロとPC(Mac、Windowsなど)の相互通信を行うことができています。今後は、ラズパイゼロとPCにそれぞれPythonソフトを作成し、任意の制御文字列を送受信するシステムを構築予定です!
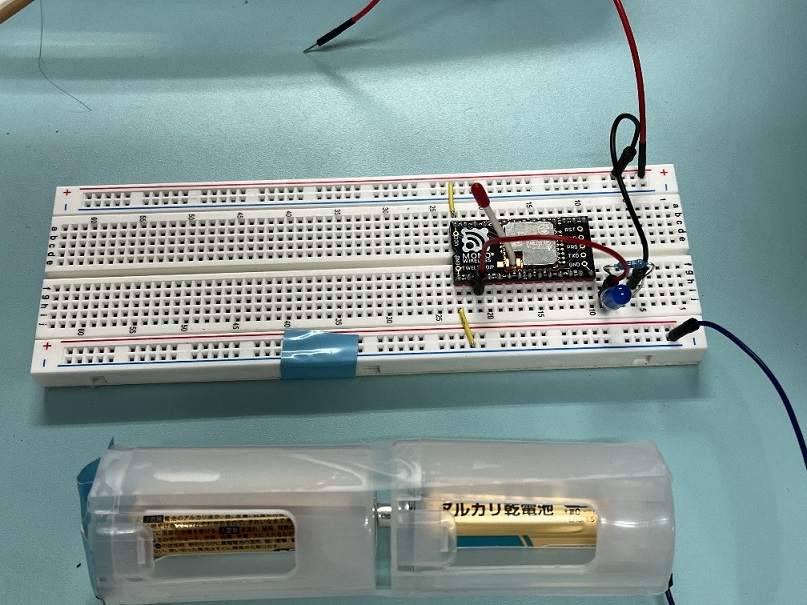
TWEILITE実験の様子
LoRaを用いたシステム構築と通信距離調査
こちらは主に筆者である私が進めており、LoRaモジュールとPCBアンテナを使用してどの程度の距離まで通信が可能か確認する実験を行う予定です。TWEILITEによるシステムと同様、ラズパイゼロとPCにPythonソフトを作成し、相互通信を行うものになります。6月中にはシステムを構築し、暑くなる前に実験を始めたいですね。。
(*毎年真夏に死にそうになりながら野外での実験を繰り返しているローバーチームです。アイスや果物の差し入れに歓喜する姿をよく見かけます)

購入したLoRaモジュールとアンテナ
ARLISS用小型基板の製作
こちらも主に私が進めているものになりますが、昨年度の北海道 Space Probe Contest向けに作成した小型基板の改良版を設計・製作中です。
とは言っても、部品不足のあおりを受け中々部品が集まらず、モチベーションが低下したままの状態です。なんとか部品をかき集めるところまでは完了した?ため、そろそろ本腰を入れて設計・製作を頑張っていきたい所存です。
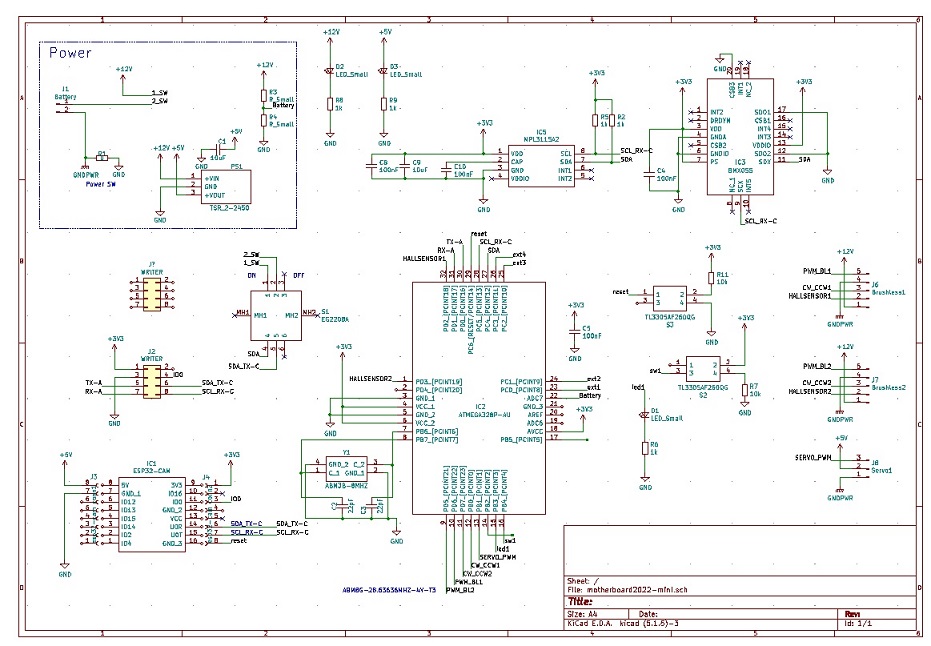
設計中のローバー制御の小型基板
電装系も引き続き、Space Probe ContestやARLISS、さらには宇宙を目指して、開発を進めていきます!
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
あなたも一緒に、ローバー開発してみませんか?
リーマンサットメンバーの活動を下記にまとめました。ぜひご覧ください!
 【この記事を書いたメンバー】
【この記事を書いたメンバー】
 【この記事を書いたメンバー】
【この記事を書いたメンバー】技術部 ローバーチーム 檜山
担当:電装・ソフト